The
step wise procedure to make the Arduino PIR sensor alarm

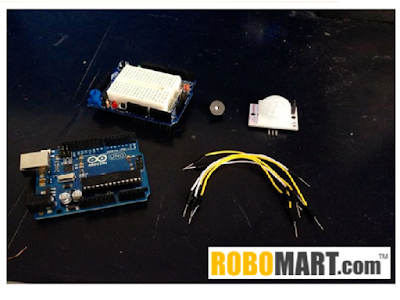
Step 1: Parts Required
Step 2 :
Assembly




Step 3: Programming
Write This programe in the Arduino IDE, and after click the blue
arrow at the top pointing left to upload the code into the arduino board.
//
Uses a PIR sensor to detect movement, buzzes a buzzer
//
more info here: http://blog.makezine.com/projects/pir-sensor-arduino-alarm/
//
email me, John Park, at jp@jpixl.net
//
based upon:
//
PIR sensor tester by Limor Fried of Adafruit
//
tone code by michael@thegrebs.com
int
ledPin = 13; // choose the
pin for the LED
int
inputPin = 2; // choose the
input pin (for PIR sensor)
int
pirState = LOW; // we start,
assuming no motion detected
int
val = 0; // variable
for reading the pin status
int
pinSpeaker = 10; //Set up a
speaker on a PWM pin (digital 9, 10, or 11)
void
setup() {
pinMode(ledPin, OUTPUT); // declare LED as output
pinMode(inputPin, INPUT); // declare sensor as input
pinMode(pinSpeaker, OUTPUT);
Serial.begin(9600);
}
void
loop(){
val = digitalRead(inputPin); // read input value
if (val == HIGH) { // check if the input is HIGH
digitalWrite(ledPin, HIGH); // turn LED ON
playTone(300, 160);
delay(150);
if (pirState == LOW) {
// we have just turned on
Serial.println("Motion
detected!");
// We only want to print on the output
change, not state
pirState = HIGH;
}
} else {
digitalWrite(ledPin, LOW); // turn LED
OFF
playTone(0, 0);
delay(300);
if (pirState == HIGH){
// we have just turned off
Serial.println("Motion
ended!");
// We only want to print on the output
change, not state
pirState = LOW;
}
}
}
//
duration in mSecs, frequency in hertz
void
playTone(long duration, int freq) {
duration *= 1000;
int period = (1.0 / freq) * 1000000;
long elapsed_time = 0;
while (elapsed_time < duration) {
digitalWrite(pinSpeaker,HIGH);
delayMicroseconds(period / 2);
digitalWrite(pinSpeaker, LOW);
delayMicroseconds(period / 2);
elapsed_time += (period);
}
}
No comments:
Post a Comment